Written by Jeff Roberts
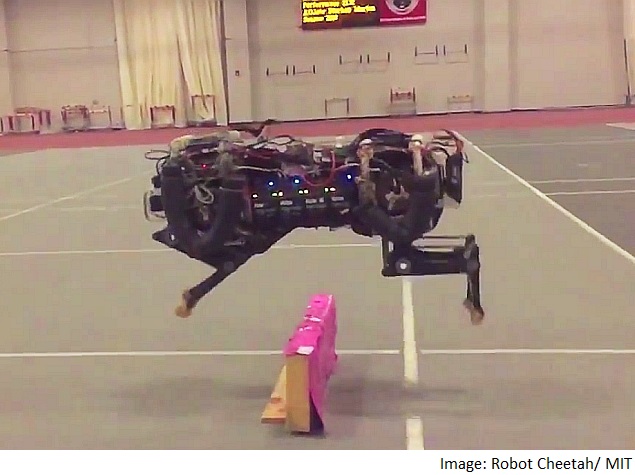
MIT researchers have developed the world’s first robotic cheetah, with the ability to run at impressive speeds and jump over obstacles in its path.
Just like we humans do, the robot cheetah detects something in its path, estimates the height and distance, then gauges the best time to jump while adjusting its stride to land just short of the obstacle.
As seen in the video below, researchers hooked the cheetah up to a treadmill while throwing various objects in its path, from smaller items to obstacles up to 18 inches tall, and as you can probably guess, the cheetah successfully landed every one of them.
While we’re not yet sure whether this feat is amazing or terrifying, the team of researchers involved are excited about the progress.
“A running jump is a truly dynamic behavior,” said Sangbae Kim, assistant professor of mechanical engineering at MIT, to Phys.org. “You have to manage balance and energy, and be able to handle impact after landing. Our robot is specifically designed for those highly dynamic behaviors.”
Kim and his colleagues—including research scientist Hae won Park and postdoc Patrick Wensing—will demonstrate their cheetah’s running jump at the DARPA Robotics Challenge in June, and will present a paper detailing the autonomous system in July at the conference Robotics: Science and Systems.
Just last year, the team demonstrated that the robotic cheetah could run without the use of any cameras or vision system.
Interestingly, Kim says the algorithm that the robot uses does not provide an optimal jumping control, but rather, only a feasible one.
“If you want to optimize for, say, energy efficiency, you would want the robot to barely clear the obstacle—but that’s dangerous, and finding a truly optimal solution would take a lot of computing time,” Kim told Phys.org. “In running, we don’t want to spend a lot of time to find a better solution. We just want one that’s feasible.”
Sometimes, that means the robot may jump much higher than it needs to—and that’s OK, according to Kim: “We’re too obsessed with optimal solutions. This is one example where you just have to be good enough, because you’re running, and have to make a decision very quickly.”
The team tested the MIT cheetah’s jumping ability first on a treadmill, then on a track. On the treadmill, the robot ran tethered in place, as researchers placed obstacles of varying heights on the belt. As the treadmill itself was only about 4 meters long, the robot, running in the middle, only had 1 meter in which to detect the obstacle and plan out its jump. After multiple runs, the robot successfully cleared about 70 percent of the hurdles.
In comparison, tests on an indoor track proved much easier, as the robot had more space and time in which to see, approach, and clear obstacles. In these runs, the robot successfully cleared about 90 percent of obstacles.
Kim is now working on getting the MIT cheetah to jump over hurdles while running on softer terrain, like a grassy field.
This is so cool! What are your thoughts on the jumping robot cheetah? Would you run the other way if you saw it? Share with us in the comment section below!
Source:
Originally posted @ Collective Evolution







{kind=link}